Productos
1000:1 Micro Metal Gearmotor HP 6V with Extended Motor Shaft

Micro motoreductor de relación de engranajes 1000:1. Posee una extensión de su eje, lo que permite obtener feedback de posicionamiento con un encoder (no incluído).
COD: P002373
Peso: 0.010 Kg
Disponibilidad: En Stock
ARS 4990.00
El producto no está disponible para la venta en este momento
Características
Description:
This gearmotor is a miniature high-power, 6 V brushed DC motor with a 986.41:1 metal gearbox, making it a great choice for applications requiring fine control at very low speeds. It has a cross section of 10 × 12 mm, and the D-shaped gearbox output shaft is 9 mm long and 3 mm in diameter. This version also has a 4.5 × 1 mm extended motor shaft. (Note: stall torque and current specifications are theoretical values; stalling the motor will damage the gearbox.)
Key specifications:
| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 6 V | 31 RPM, 70 mA | 12 kg⋅cm (170 oz⋅in), 1.6 A |
Overview:
These tiny brushed DC gearmotors are available in a wide range of gear ratios—from 5:1 up to 1000:1—and with five different motors: high-power 6 V and 12 V motors with long-life carbon brushes (HPCB), and high-power (HP), medium power (MP), and low power (LP) 6 V motors with shorter-life precious metal brushes. The 6 V and 12 V HPCB motors offer the same performance at their respective nominal voltages, just with the 12 V motor drawing half the current of the 6 V motor. The 6 V HPCB and 6 V HP motors are identical except for their brushes, which only affect the lifetime of the motor.
The HPCB versions (shown on the left in the picture below) can be differentiated from versions with precious metal brushes (shown on the right) by their copper-colored terminals. Note that the HPCB terminals are 0.5 mm wider than those on the other micro metal gearmotor versions (2 mm vs. 1.5 mm), and they are about 1 mm closer together (6 mm vs. 7 mm).
 |
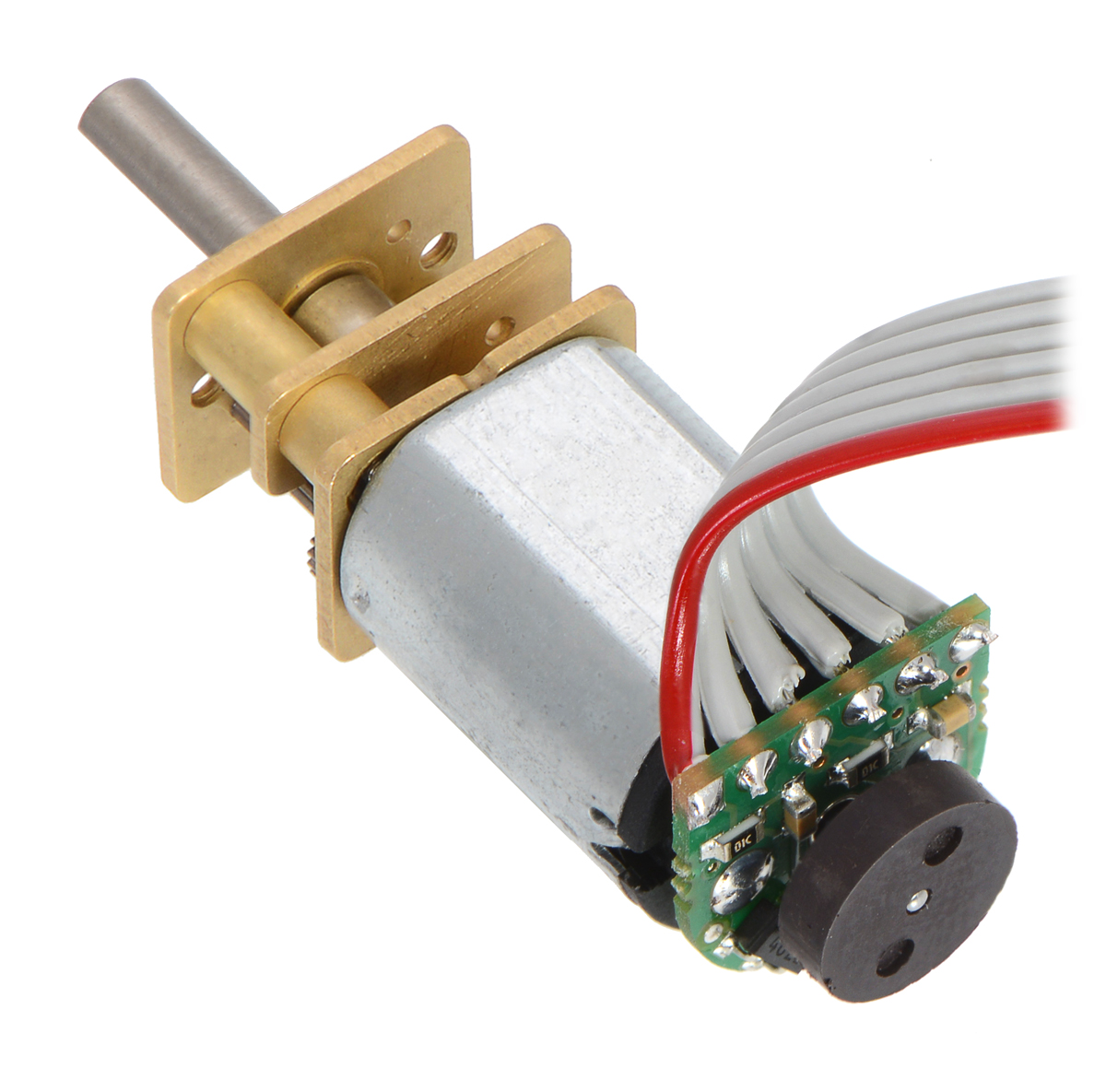 |
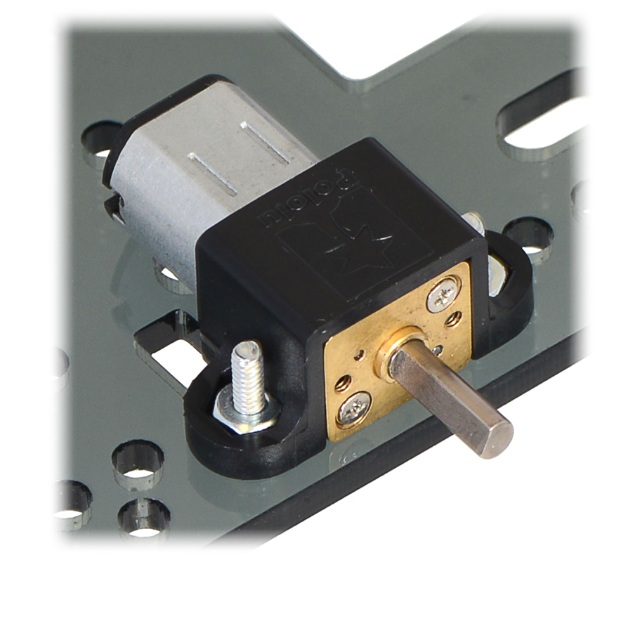
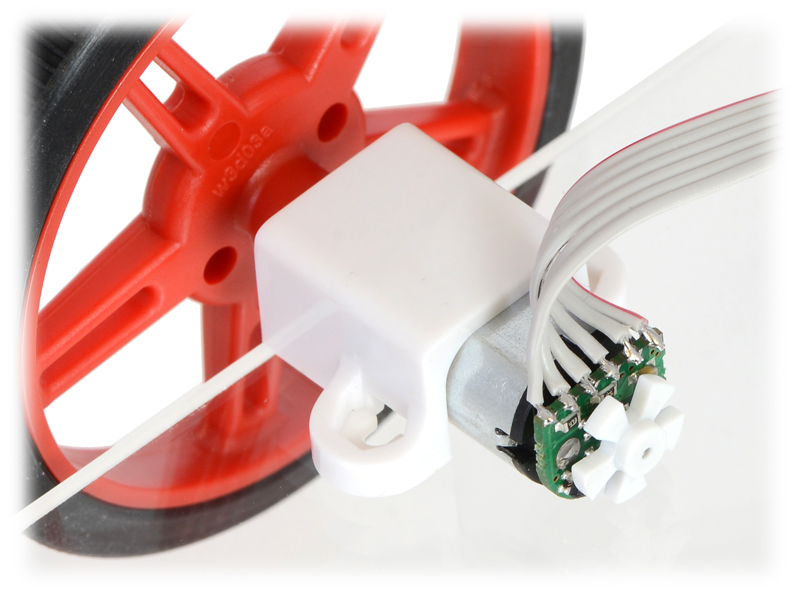
Versions of these gearmotors are also available with an additional 1 mm-diameter output shaft that protrudes from the rear of the motor. This 4.5 mm-long rear shaft rotates at the same speed as the input to the gearbox and offers a way to add an encoder, such as our magnetic encoder for micro metal gearmotors (see the picture on the right), to provide motor speed or position feedback.
With the exception of the 1000:1 gear ratio versions, all of the micro metal gearmotors have the same physical dimensions, so one version can be easily swapped for another if your design requirements change.
Please see the micro metal gearmotor datasheet (2MB pdf) for more information, including detailed performance graphs for each micro metal gearmotor version. You can also use our dynamically sortable micro metal gearmotor comparison table for search for the gearmotor that offers the best blend of speed, torque, and current-draw for your particular application. A more basic comparison table is available below.
Note: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. The recommended upper limit for instantaneous torque is 2.5 kg-cm (35 oz-in) for the 380:1 and 1000:1 gearboxes, and 2 kg*cm (25 oz-in) for all the other gear ratios; we strongly advise keeping applied loads well under this limit. Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes, especially for the versions that use high-power (HP and HPCB) motors; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
In general, these kinds of motors can run at voltages above and below their nominal voltages; lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor.
Details for item #2373:
These tiny, high-torque gearmotors have the highest gear ratio of any motor we sell, which makes them a great choice for applications that require extremely low motor speeds. With no load, the output shaft turns at approximately 31 RPM at 6 V, and we were able to achieve rotation rates of around 2.5 RPM at 0.5 V on a test unit (note that performance will vary slightly from unit to unit). For a version that can turn even slower, consider the lower-power 1000:1 micro metal gearmotor, which has a no-load rotation rate of approximately 13 RPM at 6 V and close to 1 RPM at around 0.5 V.
Note: Because of the high gear ratio, these motors can generate enough torque to damage themselves, so you should avoid stalling them.
Gearmotor Dimensions:
In terms of size, these gearmotors are very similar to Sanyo’s popular 12 mm NA4S DC gearmotors, and gearmotors with this form factor are occasionally referred to as N20 motors. The versions with carbon brushes (HPCB) have slightly different terminal and end-cap dimensions than the versions with precious metal brushes, but all of the other dimensions are identical.
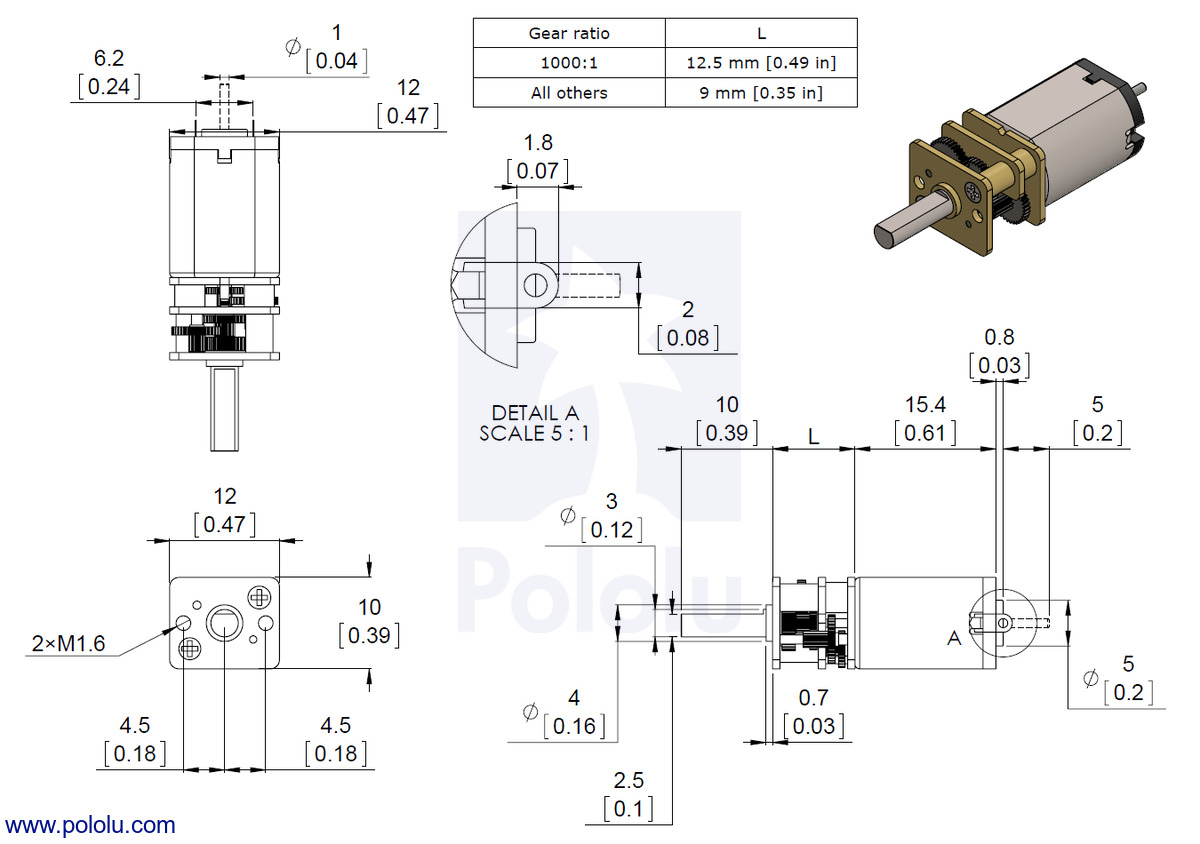
Dimensions of versions with carbon brushes (HPCB):
 |
|
Dimensions of the Pololu micro metal gearmotors with carbon brushes (HPCB). Units are mm over [inches]. |
|---|
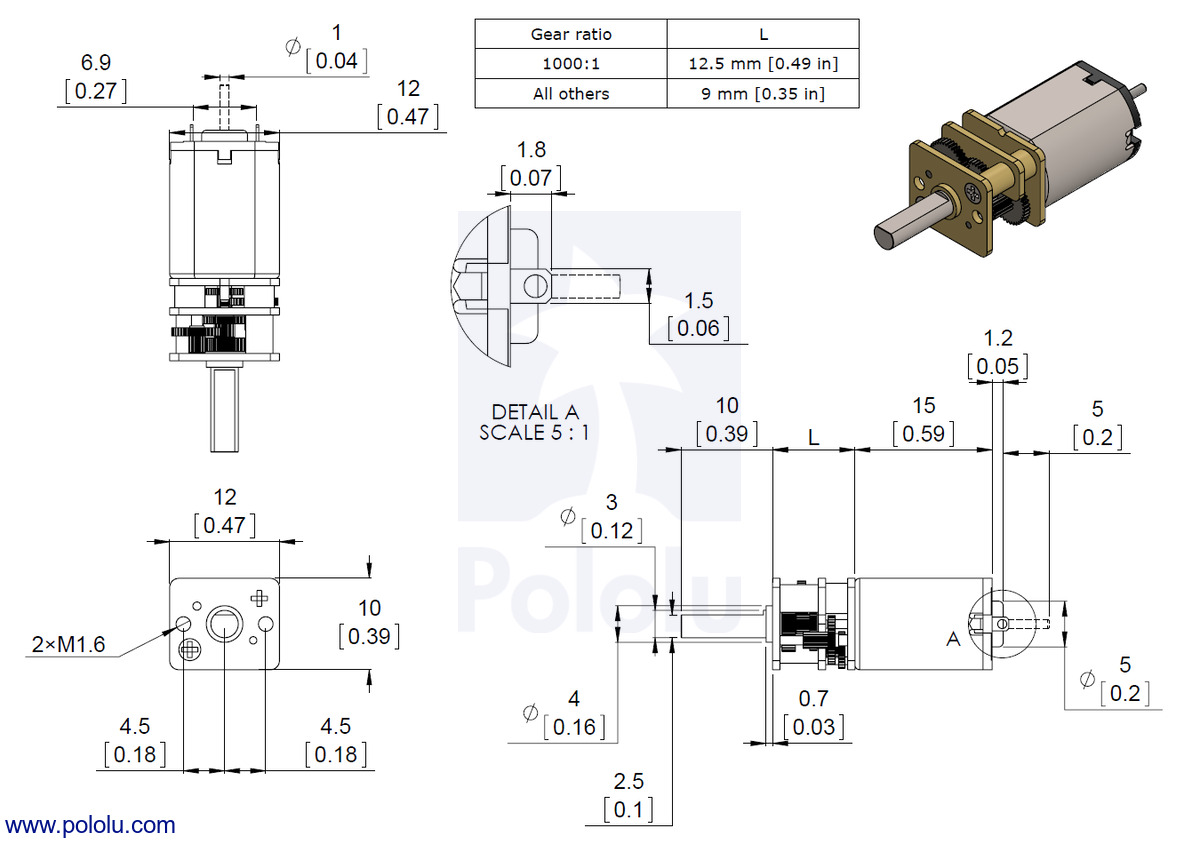
Dimensions of versions with precious metal brushes (LP, MP, and HP)
 |
|
Dimensions of the Pololu micro metal gearmotors with precious metal brushes: low-power (LP), medium-power (MP), and high-power (HP). Units are mm over [inches]. |
|---|
These diagrams are also available as a downloadable PDF (262k pdf).
Motor Accessories:
- Wheels and hubs: The micro metal gearmotor’s output shaft matches our assortment of Pololu wheels and the Solarbotics RW2i rubber wheel. You can also use our Pololu universal mounting hubs to mount custom wheels and mechanism to the micro metal gearmotor’s output shaft, and you can use our 12mm hex wheel adapter to use this motor with many common hobby RC wheels.
|
|
|



 |
|
12mm Hex Wheel Adapter for 3mm Shaft on a Micro Metal Gearmotor. |
|---|
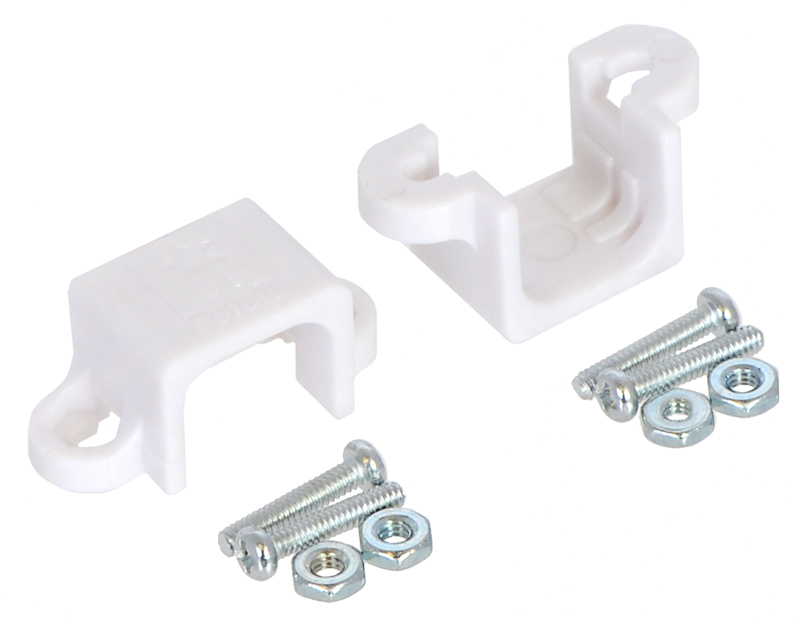
- Mounting brackets: Our mounting bracket (also available in white) and extended mounting bracket are specifically designed to securely mount the gearmotor while enclosing the exposed gears. We recommend the extended mounting bracket for wheels with recessed hubs, such as the Pololu wheel 42×19mm. Our micro metal gearmotors will also work with our 15.5D mm metal gearmotor bracket pair.
|
|
|
|

- Quadrature encoders: We offer several quadrature encoders that work with our micro metal gearmotors.
|
|
|
Note: The HPCB versions of our micro metal gearmotors are not compatible with our #2590 and #2591 optical encoders or our older #2598 magnetic encoders(the terminals are too wide to fit through the corresponding holes in the encoder boards). However, they are compatible with our newer #3081 magnetic encoders.
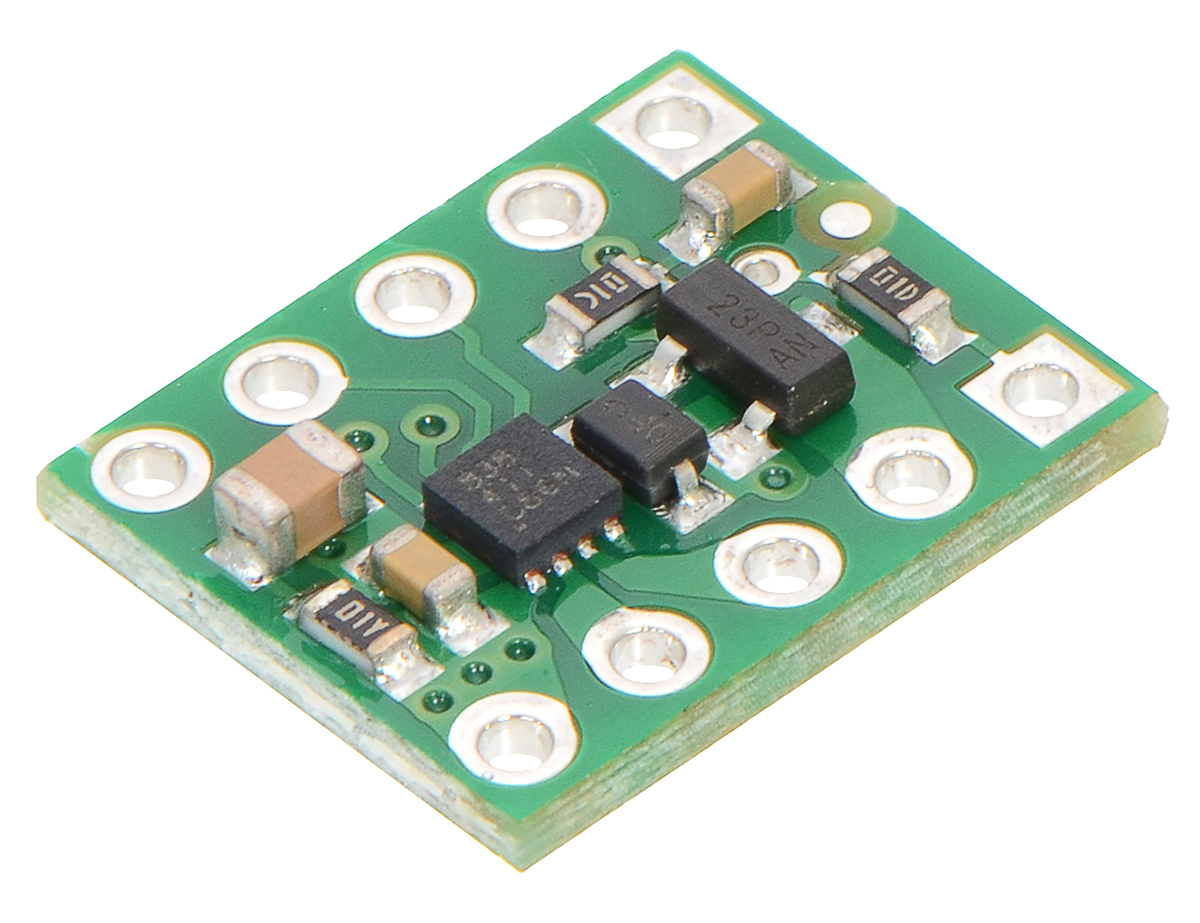
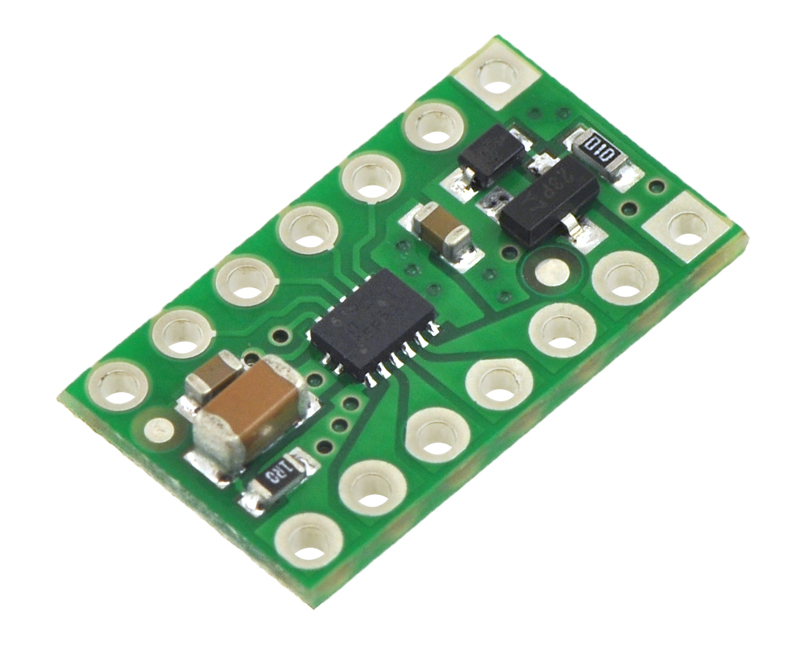
- Motor controllers and drivers: We have a number of motor controllers, motor drivers, and robot controllers that make it easy to drive these micro metal gearmotors. For the 6 V micro metal gearmotors, consider the DRV8838 single-channel motor driver carrier, the DRV8833 dual motor driver carrier, and DRV8835 dual motor driver carrier (or DRV8835 shield for Arduino). For the 12 V micro metal gearmotors, consider the MAX14870 single-channel motor driver carrier, DRV8801 single-channel motor driver carrier, and A4990 dual motor driver carrier (or A4990 shield for Arduino).
|
|
|
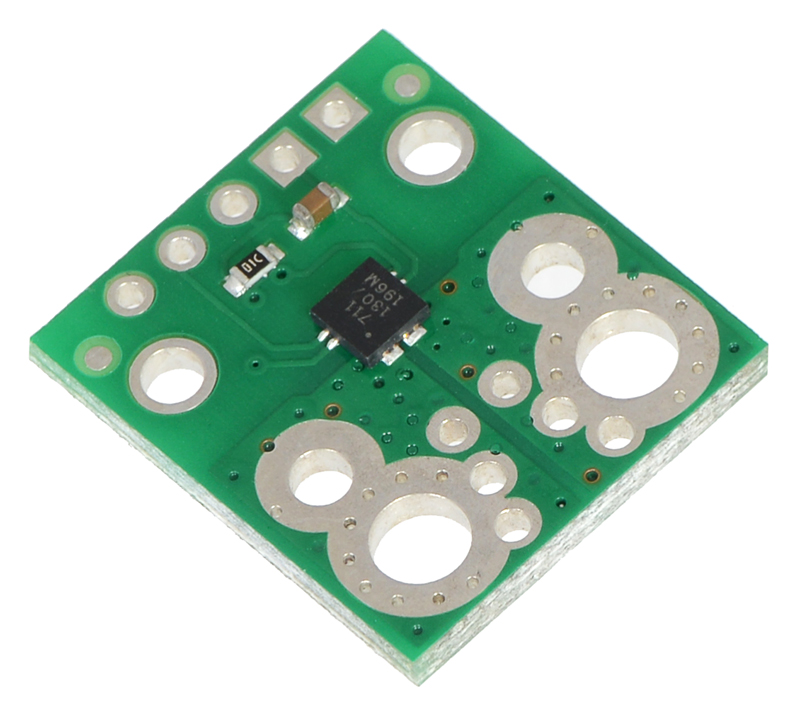
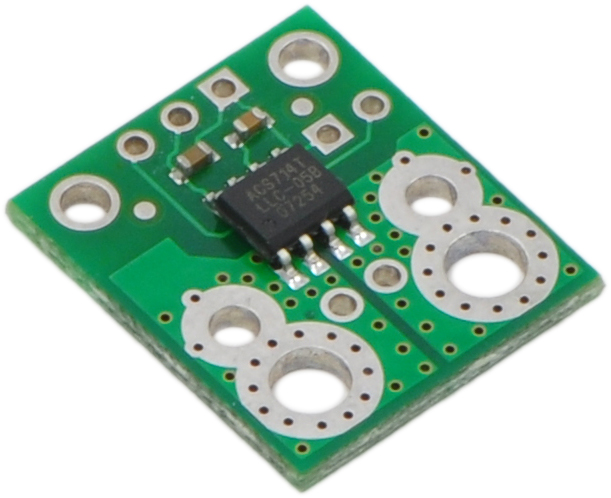
- Current sensors: We have an assortment of Hall effect-based current sensors to choose from for those who need to monitor motor current:
|
|
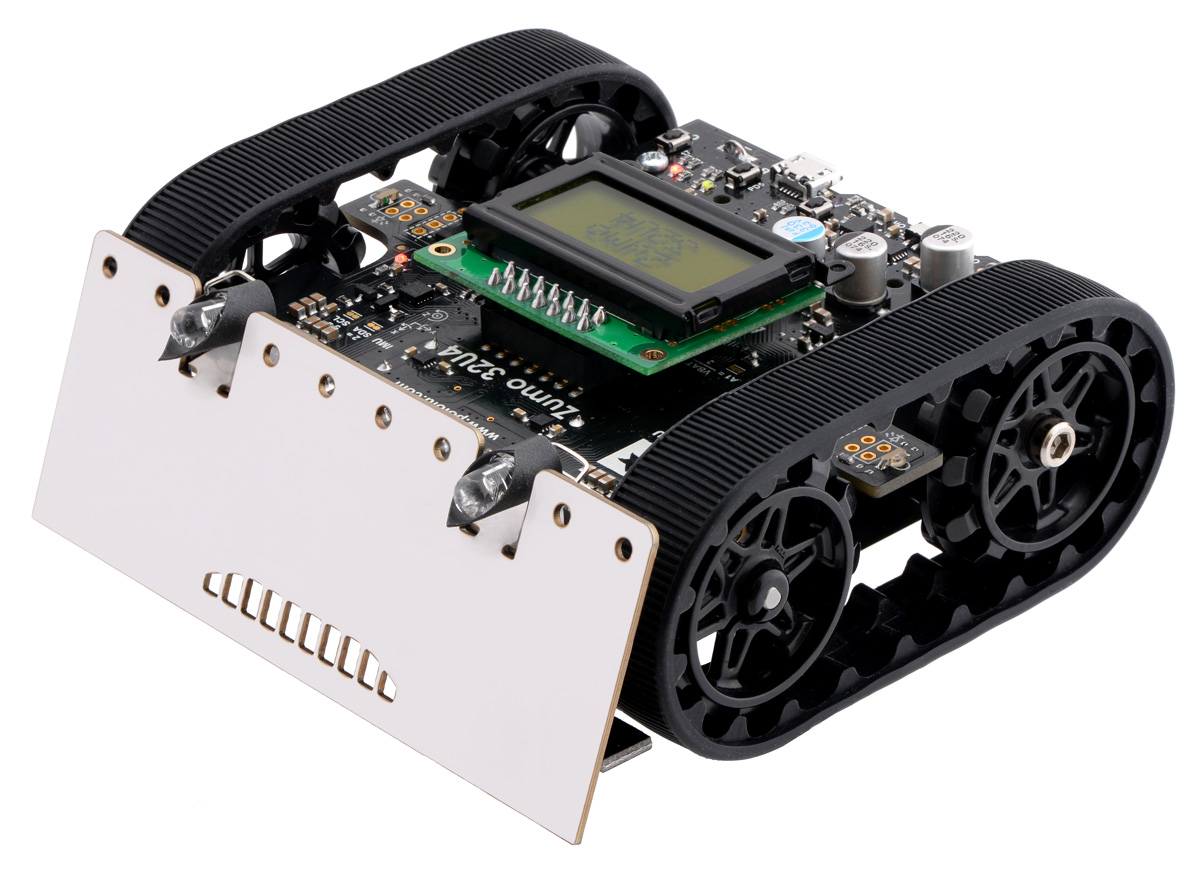
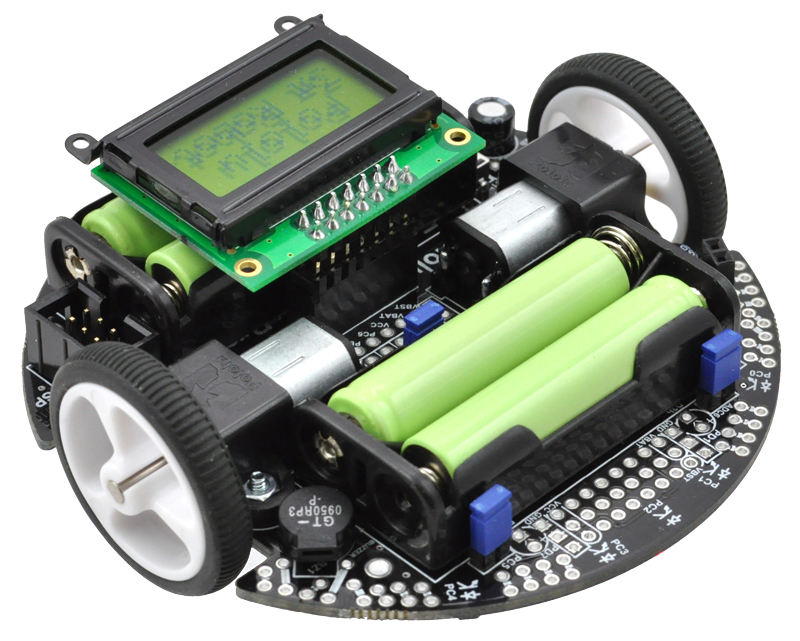
We also incorporate these motors into some of our products, including our Zumo robot and 3pi robot :
|
|
Selecting the Right Gearmotor:
We offer a wide selection of metal gearmotors that offer different combinations of speed and torque. Our metal gearmotor comparison table can help you find the motor that best meets your project’s requirements.